")
")




Betrieb an Frequenzumrichtern
Beim Betrieb an Frequenzumrichtern ist dringend drauf zu achten, daß diese einen nachgeschalteten Sinusfilter hoher Qualität besitzen. Bezugnehmend auf die europäische Norm für drehende elektrische Maschinen, DIN IEC/TS 60034-17, ist die erhöhte Beanspruchung des Motoren-Wicklungssystems durch Spannungsspitzen und die Gefahr von Lagerströmen durch kapazitiv eingekoppelte Spannung, zu verhindern, indem ein passender (alpoliger) Sinus-Filter eingesetzt wird.
Beim Betrieb an Frequenzumrichtern ist dringend drauf zu achten, daß diese einen nachgeschalteten Sinusfilter hoher Qualität besitzen. Bezugnehmend auf die europäische Norm für drehende elektrische Maschinen, DIN IEC/TS 60034-17, ist die erhöhte Beanspruchung des Motoren-Wicklungssystems durch Spannungsspitzen und die Gefahr von Lagerströmen durch kapazitiv eingekoppelte Spannung, zu verhindern, indem ein passender (allpoliger) Sinus-Filter eingesetzt wird.
Beschreibung:
Standard-Frequenzumrichter ohne Sinusfilter haben eine blockförmige, bzw. puls-weiten-modulierte (PWM) Ausgangsspannung. Die Norm (DIN IEC/TS 60034-17) beschreibt die erhöhte Beanspruchung des Motoren-Wicklungssystems durch Spannungsspitzen (bis zu einem dU/dt von 5000 KV/s), wodurch der vorzeitige Ausfall der Motoren hervorgerufen werden kann.Die Leistungsfähigkeit von Elektronikbauteilen hat in den letzten Jahren stark zugenommen. Dies trifft in besonderem Maße für die bei Frequenzumrichtern verwendeten IGBT Module (Transistoren) zu. Diese elektronischen Schalter sind notwendig zur Erzeugung der PWM Spannung des Frequenzumrichters.Die hochfrequenten Spannungsimpulse des FU verlaufen auf der Motorzuleitung ähnlich einer Welle. Im Bereich des Motors werden diese Spannungsimpulse reflektiert. Ähnlich dem Dopplereffekt entstehen durch Addition der zurücklaufenden mit der hinlaufenden Welle Überspannungen, die den Motor in der Wicklung beschädigen können.Bei Zuleitungen über 0,5m können sich die genannten Effekte sogar noch sehr schnell verstärken, so daß die Motoren noch stärkeren pulsweitenmodulierten Spannungsspitzen ausgeliefert sind.
Obwohl wir in unseren Motoren bereits die Isolationsklasse H einsetzen kann es durch die Besonderheiten der Frequenzumrichter-Spannung dennoch aufgrund der kleinen Motore und der damit verbundenen dünnen Drahtquerschnitte zu einer Überlastung und dem Ausfall des Motors kommen. Dies betrifft aber alle kleineren Motore, welche mit Frequenzumrichtern ohne nachgeschalteten Sinusfilter betrieben werden.
Beispieldarstellung Spannungsverlauf nach Sinusfilter
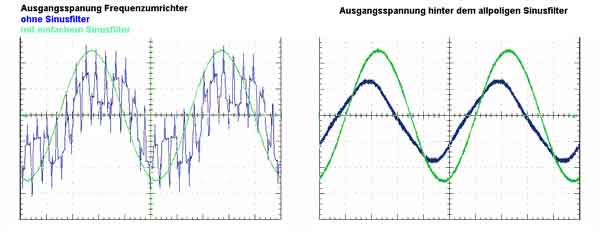
Aus diesem Grunde müssen bei Einsatz eines Frequenzumrichters daraf geachtet werden, daß am AUsgang des Frequnezumrichters ein (allpoliger) Sinusfilter verbaut wird. Bei einigen Frequenzumrichtern sind dies bereits integriert.
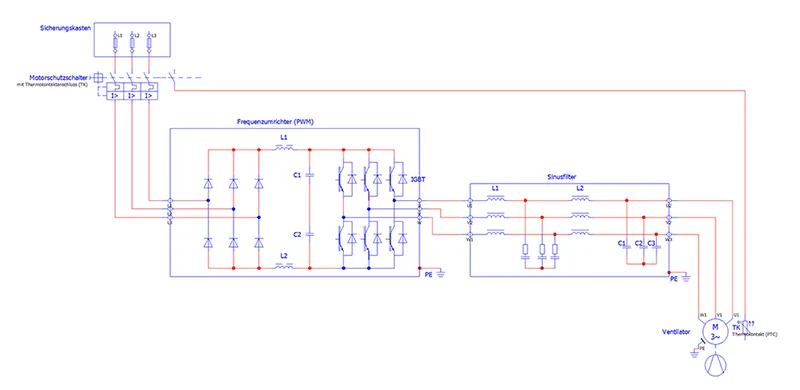
Beispielhafter Aufbau der Regelung mit Frequenzumrichter:

Die Netzfilter (EMV-Filter) sind meist bei CE Kennzeichnung des Frequnezumrichters integriert, die Ausgangsfilter fehlen aber oft oder müssen beim Hersteller mit bestellt werden. Es können aber meist auch Fremdfabrikate eingesetzt werden.
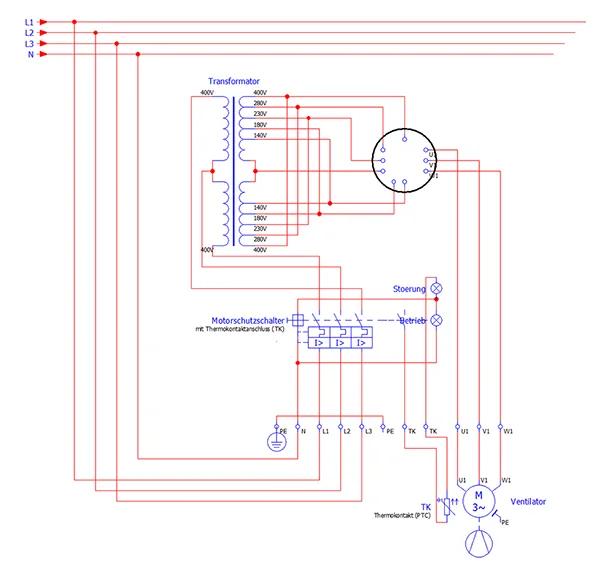
Frequenzumrichter und Trafo-Regelung bei Ventilatoren
Die Motordrehzahl n hängt von der Drehzahl des Magnetfelds ab und lässt sich wie folgt
ausdrücken:
n ~ (1-s) x fn= Drehzahl, s= Schlupf, f= Frequenz der Versorgerspannung
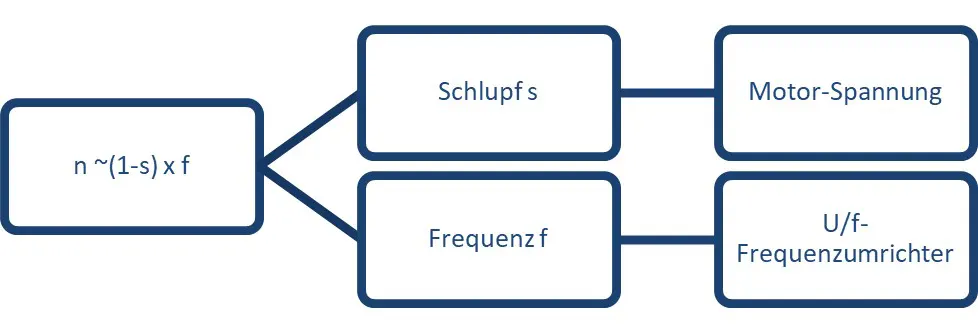
Schlupfregelung
Die Regelung der Motordrehzahl mithilfe des Schlupfs erfolgt durch die Änderung der Statorversorgungsspannung -> Transformatorische Regelung (siehe Traforegler).
Der Vorteil liegt in einer den Motor wenig belastenden Regelung, die auch keine EMV-Störungen hervorruft. Hier spricht man meist von einer Drehzahlsteuerung, da die Drehzahl von Hand eingestellt wird.
Eine Regelung ist mit Hilfe einer Vorschaltplatine und Relaissteuerung der Trafoausgänge möglich. Auch die stufenlose transformatorische Regelung ist möglich, hierbei wird aufgrund der 3 Ringkerntransformatoren der Regler groß und schwer.
Frequenzregelung
Mit einer frequenzvariablen Versorgung ist es möglich, die Motordrehzahl zu regeln. Die Drehzahl des Magnetfelds und somit auch die Rotordrehzahl ändern sich mit der Frequenz. Um das Drehmoment des Motors aufrechtzuerhalten, muss die Motorspannungsänderung zusammen mit der Frequenzänderung etwa proportional erfolgen (U/f-Umrichter).
Die magnetische Flussdichte (Φ), die proportional zum Drehmoment ist, wird bestimmt durch das konstante Verhältnis (U/f) des Motors. Eine konstante Flussdichte garantiert ein optimales Drehmoment des Motors.
Diese Steuerung der Ausgangswerte durch den Frequenzumrichter nennt sich „U/f“-Steuerung.
Bei der Frequenzregelung entstehen zusätzliche Oberschwingungsströme. Dadurch wird in der Stator-Wicklung des Motors eine erhöhte Temperaturbelastung hervorgerufen. Aus diesem Grund ist mindestens die Isolationsklasse F für Frequenzumrichter-geregelte Motore vorgeschrieben. Die Motore der Firma KAISER Ventilatorenbau haben alle die Isolationsklasse F oder sogar H, sind also für FU-Regelung ausgelegt. Zusätzlich sind auf Bestellung PTC-Fühler im Motor eingebaut, welche im Frequenzumrichter oder durch eine Schützschaltung vor dem Umrichter angeschlossen werden müssen.
FUNKTIONSWEISE EINES FREQUENZUMRICHTERS:
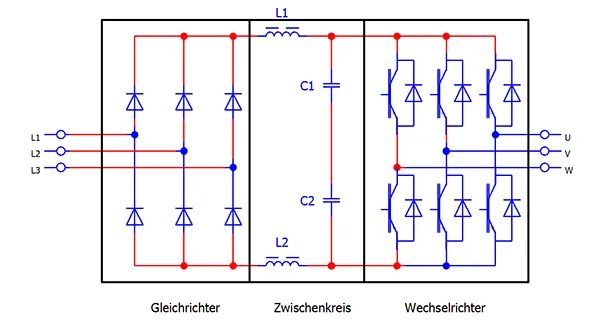
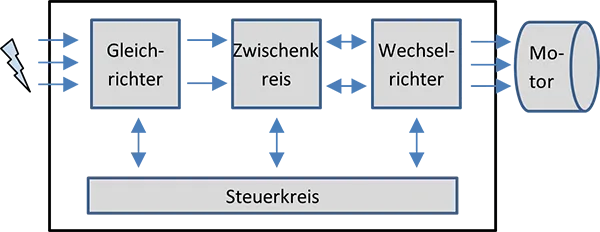
Allgemeiner Aufbau:
Oder Ausführlicher:
Die drei Hardwarekomponenten (Gleichrichter, Zwischenkreis und Wechselrichter) sind unabhängig vom Hersteller und bestehen fast immer aus den gleichen Grundkomponenten. In den meisten Fällen handelt es sich dabei um Standardkomponenten, die meistens dieselben externen Hersteller zuliefern.
Gleichrichter
Der Gleichrichter ist der erste Teil und wird direkt an ein Einphasen- oder Dreiphasen-Versorgungsnetz angeschlossen. Er erzeugt eine pulsierende Gleichspannung. In Anwendungen mit kleinen Leistungen (bis 30 kW, je nach Hersteller) kommen üblicherweise Brückengleichrichter zum Einsatz (siehe oben, 6-Dioden in Blockschaltung).
Zwischenkreis
Im Zwischenkreis wird die Gleichrichterspannung in eine reine Gleichspannung umgewandelt.
Das geschieht in der Regel durch einen Filter, der aus einem Kondensator und einer Spule besteht. Bei Frequenzumrichtern kleinerer Leistung wird dabei der konstante Zwischenkreis verwendet, daher ist die Spannung vor dem Wechselrichter eine Gleichspannung mit konstanter Höhe.
Die gewünschte Frequenz und die proportionale Spannungshöhe werden dann erst im Wechselrichter erzeugt.

Wechselrichter
Aus dem Zwischenkreis erhält der Wechselrichter die konstante Gleichspannung.
Der Wechselrichter übernimmt die Umwandlung der konstanten Gleichspannung des Gleichrichters in eine variable Wechselspannung. Er generiert zudem die Frequenz der Motorspannung.
In den letzten Jahren haben sich durch die Entwicklung der schnell schaltenden IGBT-Transistoren diese als eine gute Wahl für Frequenzumrichter bezüglich Leistungsbereich, hoher Leitfähigkeit, hoher Taktfrequenz und einfacher Steuerung durchgesetzt.
Nachteilig ergeben sich durch die hohen Taktfrequenzen verstärkt Oberschwingungen, die sich bei längeren Leitungen aufschwingen und die Motorwicklung beschädigen. Eine Freilaufdiode ist zu jedem Transistor parallelgeschaltet, weil über die induktive Ausgangslast (Motorwicklung)
hohe Induktionsspannungen auftreten können, die die Schaltungskomponenten zerstören können.
Frequenzumrichter mit konstanter Zwischenkreisspannung nutzen die Pulsweitenmodulation (PWM). Diese Technologie verändert die Weite der Spannungspulse.
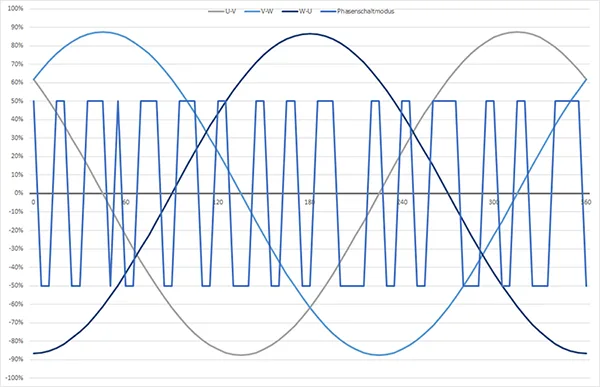
Das folgende Bild veranschaulicht, wie durch die Veränderung der Spannungsweite durch den IGBT (Ein-Ausschaltung) die 3 Stromverläufe idealerweise simuliert werden. Dabei entstehen aber die problematischen Oberschwingungen, die später durch den Sinusfilter entfernt werden müssen.
Steuerkreis
Das letzte Element des Frequenzumrichters ist der Steuerkreis. Hier unterscheiden sich die Hersteller, da jeder Hersteller etwas andere Steuersoftware entwickelt. Auch der Aufbau und die Komplexität variiert im Steuerkreis. Daraus resultieren sehr unterschiedliche Spannungsverläufe und Oberschwingungsanteile am Frequenzumrichter-Ausgang, was den Einsatz eines normierenden Sinusfilters oft notwendig macht.
Ausführungsformen des Steuerkreises sind die einfache Steuerung über Spannung und Frequenz (skalare Steuerung oder U/f-Steuerung) ohne Rückmeldungen des Motorsystems zu berücksichtigen. Diese Steuerungsart ist günstig, kann aber dem nachfolgenden System wegen der fehlenden Rückmeldungen schaden.
Bei modernen Frequenzumrichtern wird immer häufiger die Vektorsteuerung eingesetzt. Dabei berücksichtigt die Software den vom FU gemessenen Motorstrom und die Spannung, Frequenz und berechnet damit zusätzlich zu Spannung und Frequenz den Spannungswinkel.
Anhand der gemessenen Motorströme in den drei Zuleitungen erfolgt die Berechnung der Komponenten mit Blindstrom und Wirkstrom .
Basierend auf den gemessenen Strömen und den aktuellen Werten des Spannungsvektors schätzt der Frequenzumrichter das Drehmoment im Luftspalt und berechnet die zusätzliche Spannung, damit die Magnetfeldstärke auf dem Sollwert bleibt.
Frequenzumrichter und Ausgangsfilter
Der Einsatz moderner IGBT Transistoren in
Frequenzumrichter bewirkt das schnelle Schalten von Spannungen (hohe du/dt-Raten) im Bereich einiger tausend V/μs- mit Amplituden im Bereich von bis zu 2000 V sowie hohen Stromstärken. Dadurch sind Frequenzumrichter eine potenzielle Quelle von Oberwellenstörungen und EMV-Beeinträchtigungen. Die Störquelle ist der Wechselrichter mit Gleichspannungszwischenkreis, der eine impulsförmige Ausgangsspannung mit sehr kurzen Anstiegs- und Abfallzeiten erzeugt (auch ausgedrückt als hohe du/dt-Werte).
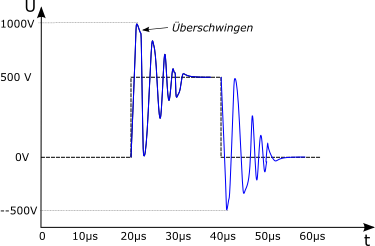
Durch die Unterschiede der Impedanzen zwischen Motor und Kabel tritt eine Reflexion auf, die ein Spannungsüberschwingen an den Motorklemmen hervorruft.
Bei kleinen Motoren nimmt der Motorwellenwiderstand zu, so dass sich ein größeres Ungleichgewicht zur Kabelimpedanz ergibt.
Auch bei parallelen Kabeln (im Drehstrombetrieb) ist der Widerstand des Kabels geringer, so dass sich ein höheres und
größeres Überschwingen erzeugt wird.
Die Anstiegszeit nimmt mit der Kabellänge zu, daher sind zu lange Kabel zu vermeiden.
(siehe auch DIN 60034ff).
Um ungeschirmte Kabel beliebiger Länge verwenden zu können und die Motorwicklung zu schützen, ist aufgrund der hohen du/dt-Werte bei kleineren Motoren unter 2 KW ein Sinusfilter am Ausgang des Frequenzumrichters erforderlich, ein einfacher du/dt-Filter reicht nicht.
Die hohen dU/dt-Werte können eine schädlich hohe Potentialdifferenz zwischen den Wicklungen im Motor hervorrufen.
Filterarten:
dU/dt- Filter:
du/dt-Filter sind aufgebaut aus in Tiefpassfilteranordnung geschalteten Kondensatoren und Spulen. Ihre Grenzfrequenz liegt über der Taktfrequenz des Frequenzumrichters.
Der Spannungsverlauf bei einem dU/dt-Filter ist immer noch pulsförmig. Die dU/dt-Filter reduzieren nur die Spannungsspitzen und die hohe Impulsantwort an den Motorklemmen.
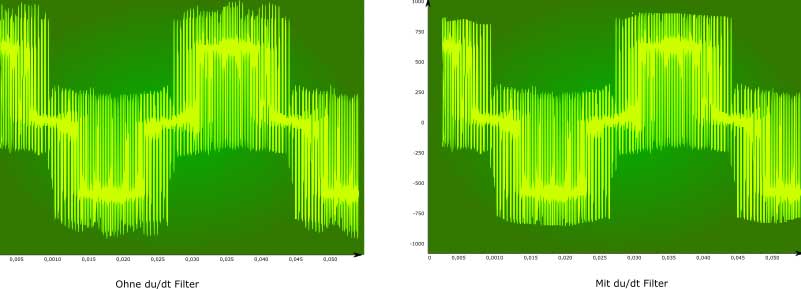
Bei dU/dt-Filtern wird die Frequenz des Überschwingens nur reduziert.
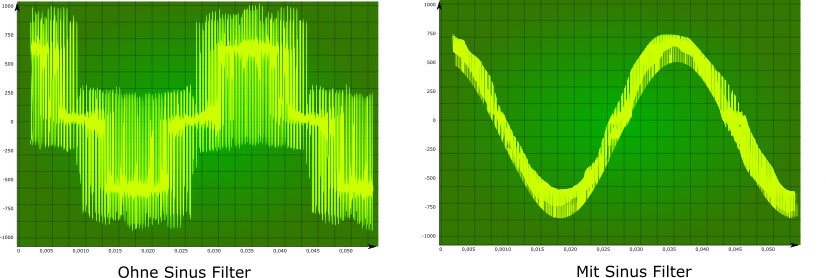
Bei Sinusfiltern hingegen kann das Überschwingen vollkommen beseitigt werden und der Motor wird durch eine sinusförmige
Spannung wie bei der Netzspannung versorgt.
Sinusfilter
Sinusfilter sind nur für niedrige Frequenzen passierbar, d.h. die Oberschwingungen hoher Frequenzen werden herausgefiltert, Strom und
Spannung werden nahezu sinusförmig ausgegeben.
Motorstörgeräusche werden somit ebenfalls
reduziert. Ein weiterer Vorteil der Sinusfilter ist die Reduktion der Belastung der Motorisolation und Lagerströme im Motor.
Der Anschluss ungeschirmter längerer Motorkabel in wird durch Sinusfilter möglich. Gerade in Anwendungen, bei denen der Motor in größerer Entfernung vom Frequenzumrichter installiert ist.
Sinusfilter bestehen aus Spulen, Kondensatoren und Hilfsbauteile in Tiefpassfilteranordnung.
Aktive Filter
Ein Aktiver Filter (AF) besteht aus einem Wechselrichter, der einen Oberschwingungsstrom in Gegenphase zu den Oberschwingungsverzerrungen des FUs erzeugt und auf diese Weise diese eliminiert. Der Nachteil ist, daß man den aktiven Filter genau auf die Oberschwingungen des Sinusfilters anpassen muß.
Ein passiver oder halbpassiver Sinusfilter besteht aus Spulen und Kondensatoren mit Widerständen und filtert so die Oberschwingungen (meist der 5. Und 7. Ordnung) heraus. Dieser ist teilweise vom Fabrikat des Frequenzumrichters unabhängig einsetzbar.